ECU/Governor for Solar T-62T-32 Engines
My contribution to my friend Platons Ultrasport 496 helicopter turbine conversion eventually led to a quite sophisticated ECU that contains a governor, a start / acceleration sequencer and an engine data recorder among other nice-to-haves. But to get there required three revisions, every one improving on the previous and simplifying the operation.
It all started with a universal electronic turbine controller that I basically designed to run one of my TS-21 turbostarters in a convenient, elegant and much more modern and controllable manner. Though this (at least so far) never came to fruition, this system provided the basics for a governor/sequencer for Platons prototype T-62T-32.
 |
This system just consisted of an analogue computer to resemble the functions of a simple hydromechanical FCU like its used on typical small APUs like the GTP30. So far, there werent any provisions for power drivers or sequencing functions. Instead, all the parameters could be adjusted via a whole bunch of pots...
Eventually, I designed a carrier for the Turbine Engine Control Module That contained the missing power supply and drivers as well as a microcontroller to monitor and sequence other functions. This basic concept proved to be very reliable and has been kept throughout the further improvements.
 |
About the time this had been completed, Platon got in touch with me in search for a turbine engine for his helicopter. I suggested to use a Solar T-62T-32 and that got the whole train arolling...
 |
I set up a simple control panel and started programming the startup sequencer, not knowing exactly the parameters that the engine would require for a clean and safe start. So what I came up with was basically the framework of the sequencer software that needed to be filled with experience. During my first visit to Platon, I was actually able to get start, accelerate and run his engine, yet with countless modifications of the code and some tweaks of the hardware. Whatsoever, it was a great success since the job could more or less be considered as a moon landing. The infrastructure electronics-wise and regarding the required embedded programming was more or less not available on-site so I had to think of everyting I would possibly need and take it with me there.
About a year after I left Platon with a running engine, advanced with his modifications to a point that he could actually lift off his helicopter for the first time on turbine power. Quickly it turned out that the manual RPM preset pot was not convenient sicne it was difficult to access being mounted on the panel and moreover it easily resulted in too big RPM changes. Since we didnt want to do completely without a manual pot (at that time...), the idea was to use a motor driven pot. Since I didnt find anything suitable off-the-shelf, I simply made my own.
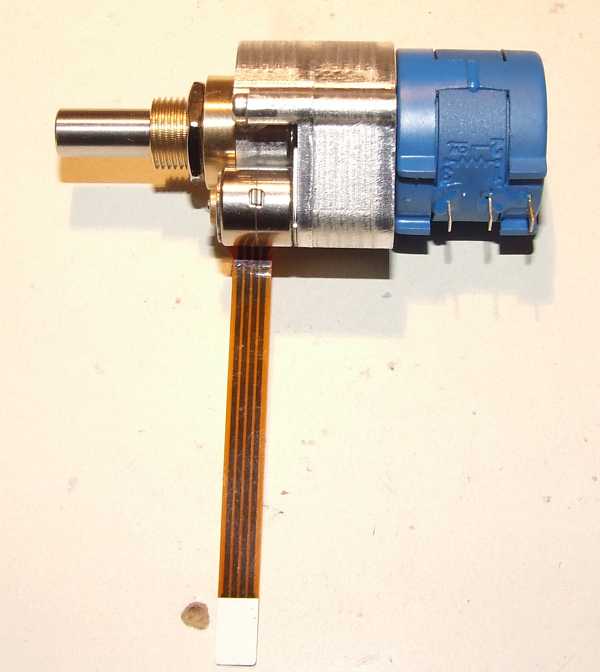 |
This device consisted of a standard, high-quality wire would ten-turn pot, coupled to a purpose-designed and built micro gearbox and driven by a sub-micro stepper motor. This assembly still fitted into the space available inside the control panel and proved to be very convenient. It was driven by a small electronic board containing a microcontroller. The input was a two-way momentary switch to provide RPM trim-up and trim-down signals, placed on top of the cyclic stick. The electronics provided trimming by minimum increments as well as an auto advance mode that was entered after the trim switch has been pressed and held for a certain duration.
Alltogether, this system worked fairly reliably and platon probably flew his helicopter in this configuration for round about 100 hours, yet I always reminded him that the whole electronics was of very experimental character.
The time came that other Ultrasport 496 owners got to know about Platons conversion and asked him for a kit or to directly convert their helicopters. As a consequence, jointly we went over all the components of the modification and looked for improvements. To me it was completely clear that the ECU for this series conversion cannot consist of the prototype setup, there were way to many internal connectors and on the other hand I found out that I can do away with at least five of the eight pots, simplifying adjustment a lot. I also always voted for a backup electrical system to provide power to the engine systems if the helicopters main electrical system should fail. Moreover, since we wanted to keep the helicopter electrics at 12 volts, a voltage converter would be required to run the engine accessories at 24 volts. All this has been addressed in my (then...) new ECU design, also including the option to record engine data in a non-volatile memory chip.
 |
 |
 |
This new system was a single-board design and consisted mostly of SMD components, making it much less susceptible to vibration. A powerful step-up converter provides 24 volts for the engine accessories, hence, provided an aftermarket 12V starter was installed, the system could be operated on a simple 12 volt battery. The ECU was placed in an off-the-shelf cast aluminium enclosure that was sealable. All the electrical connections were established via a single MIL style connector. A new, convenient engine control panel completed the package. The mechanical pot from the prototype installation has been eliminated competely in favor of a digital pot thats located directly inside the ECU. This way, all the troublesome and interference-prone low-signal wires have been gotten rid of. I produced five of these units that proved to be quite reliable. Yet, assembly was not far from a nightmare and since I kept the original microcontroller from the prototype setup, we were short of I/O pins and a true costomer firmware update was not possible on these systems. Moreover, a download of the logged engine data could only be retrieved via a special USB adapter box. Moreover, the microcontroller and the EGT thermocouple amplifier were still placed in sockets, making the installation still a little sensitive to vibration.
Since the demand for the conversion kits continuously increased, I decided to implement another modification, the current production version.
 |
This version is covered on the next page.